你将会学到的
- GNSS(全球导航卫星系统)的详细信息及其在 ADAS 和自动驾驶车辆测试和开发中的作用
- 动手使用 GPS 传感器和 raspberry pi 4 使用 python 接收实时 GPS 数据
- 探索基于 GNSS 的系统在汽车和非汽车行业的各种应用
- 使用 3 轴加速度计和 3 轴陀螺仪与 raspberry pi 4 和 python 动手
- 基于 GNSS 的校正方法 – 详细的差分 GNSS、DGPS、SBAS、GBAS、RTK、PPP
- 具有数学洞察力的加速度计、陀螺仪和磁力计的基础
- 了解 IMU – 惯性测量单元及其在 INS(惯性导航系统)中的重要性
- 使用基于卡尔曼滤波器的方法更深入(仅理论上)基于 GNSS 和 INS 的融合。
- AHRS(姿态和航向参考系统)和双 GNSS / INS 系统的详细信息
- 涵盖各种融合技术(理论)和 GNSS 和 INS 应用的多个案例研究
- 以研究文献和网络链接形式提供的其他参考资料
- 在本课程结束时,您将有信心在工作中使用基于 GNSS/INS 的传感器系统进行 ADAS/自动驾驶车辆测试和验证。
说明
传感器是高级驾驶辅助系统 (ADAS) 和自动驾驶 (AD) 技术不可或缺的一部分。传感器——像相机、雷达、激光雷达和超声波是众所周知的。这些传感器用于对车辆周围的外部环境进行感知,在某些情况下还可以进行车内感知。
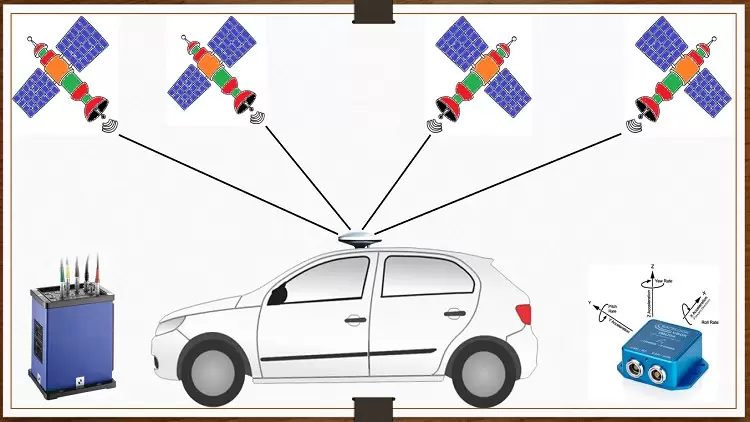
GNSS(全球导航卫星系统)、GPS(全球定位系统)与 INS(惯性导航系统)一起用于查找自我车辆本身的位置。这些传感器用于 ADAS 和 AD 行业的多种应用。这些应用包括但不限于:
1. 道路车辆定位
2. 生成用于传感器感知(雷达、激光雷达、相机)验证的地面实况数据
3. 生成用于传感器融合验证的地面实况数据
4. 用于确定性测试站点中各种 ADAS 功能的验证
5. 用于使用 GNSS/GPS 高精度时间 – 作为参考时钟同步(使用 NTP、PTP 或 gPTP)多传感器系统进行算法开发。
6.在V2X(Vehicle to Other)和V2V(Vehicle to Vehicle)应用中。
还有很多…….
GNSS/GPS + INS 传感器在各种非汽车领域也有多种应用,例如 手机和汽车导航、铁路运输 – 跟踪机车、航空 – 飞机从出发到降落的导航、海洋 – 跟踪和导航船舶、港口自动化、精准农业、露天采矿、测量、无人机、智能基础设施应用等
由于 GPS/GNSS 无法单独提供厘米级精度(这是 ADAS 和 AD 应用所必需的),因此使用了各种附加技术
1. DGNSS(差分GNSS)
2. DGPS(差分GPS)
3. SBAS(星基增强系统)
4. GBAS(地面增强系统)
5. RTK(实时动态)
6. PPP(点精密定位)
此外,惯性导航传感器 – 加速度计、陀螺仪和磁力计也与 GPS /GNSS 一起使用,以实现更好的定位和精确测量,尤其是在 GNSS 信号不可用的情况下。这包括
1. 惯性导航系统 (INS),
2. GNSS辅助INS系统,
3. AHRS(姿态航向参考系统),
4.双GNSS(或GNSS罗盘)辅助INS系统。
在本课程中,您将学习上述所有技术,以便能够在您的工作和/或项目中使用它们。此外,还包括使用带有覆盆子 pi 4 和 python3 的低成本传感器测量实时 GPS 和 IMU 数据的实践练习。
通过这个包含 11 小时视频的完整课程,您将学习
- ADAS(高级驾驶员辅助系统)的基础知识以及一些示例
- AD(自动驾驶)的基础知识以及 SAE 的自动化水平
- 简要了解ADAS和AD中使用的各种传感器,如雷达、激光雷达、摄像头和超声波。
- 许多应用涵盖了 GNSS + INS 传感器在 ADAS 和 AD 行业以及非汽车领域的使用
- 市场上提供的各种 GNSS + INS 设备(从高成本到低成本)
- 深入理解GNSS技术,信号处理,伪距计算,三边测量,GNSS误差,克服这些误差的不同方法
- GNSS 技术中使用的各种类型的坐标系和坐标系
- 什么是纬度和经度?表示它们及其相互转换的不同方式
- 用于 GPS 测量的 NMEA-0183 消息结构
- 使用低成本 GPS 设备、树莓派 4 和 python 3 进行实时 GPS 测量。
- 各种差分校正方法 – DGNSS、DGPS、SBAS、GBAS、RTK、PPP
- 了解 IMU(惯性测量单元),然后深入了解加速度计、陀螺仪和磁力计的工作原理
- 使用带有 raspberry pi 4 和 python 3 的低成本 IMU 进行实时 IMU 测量
- 通过使用 INS 的行人航位推算案例研究了解 INS(惯性导航系统)
- 深入研究 AHRS(姿态和航向参考系统)、GNSS 辅助 INS 技术和双 GNSS 辅助 INS 技术。
- 进一步的案例研究取自研究论文,以了解 GNSS 和 INS(以及其他传感器)在 ADAS、AD 和机器人技术中的应用。
注意:本课程更侧重于理解概念并提供对该领域各种技术的见解,因此有意将编程保持在最低限度。
免责声明:所有来自各种来源的参考视频仅用于教育目的,无意侵犯版权。
此课程面向哪些人:
- 任何有兴趣学习和了解基于 GNSS INS 的测量技术用于位置、速度、时间和航向估计的任何人
- 参与 ADAS 和自动驾驶汽车开发的人员 – 强烈建议参加此课程
{kind=link}